Intro
在CUDA中,host和device是两个重要的概念,我们用host指代CPU及其内存,而用device指代GPU及其内存。CUDA程序中既包含host程序,又包含device程序,它们分别在CPU和GPU上运行。一个CUDA程序的执行流程如下:
- 分配host内存,并进行数据初始化;
- 分配device内存,并从host将数据拷贝到device上;
- 调用CUDA的核函数在device上完成指定的运算;
- 将device上的运算结果拷贝到host上;
- 释放device和host上分配的内存。
核函数(kernel)是CUDA中的一个重要概念,它是在device上线程中并行执行的函数。核函数用__global__符号声明,在调用时需要用<<<grid, block>>>来指定kernel要执行的线程数量,在CUDA中,每一个线程都要执行核函数,并且每个线程会分配一个唯一的线程号thread ID,这个ID值可以通过核函数的内置变量threadIdx来获得。
CUDA中有3个函数限定词:
__global__:在device上执行,从host中调用,异步,返回类型必须是void,不支持可变参数参数,不能成为类成员函数。__device__:在device上执行,但仅可以从device中调用,不可以和__global__同时用。__host__:在host上执行,仅可以从host上调用。默认限定词。
例如考虑以下程序:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
#include <stdio.h>
__global__ void hello_world(void)
{
printf("GPU: Hello world!\n");
}
int main(int argc, char **argv)
{
printf("CPU: Hello world!\n");
hello_world<<<1, 10>>>();
cudaDeviceReset(); // if no this line ,it can not output hello world from gpu
return 0;
}
|
kernel在执行被定义的线程数量是10,所以GPU上的hello world会被打印10次。注意到核函数的执行是异步的,这时我们加一句cudaDeviceReset(),以确保程序在核函数执行完毕之后才退出主线程。
CUDA 线程管理
GPU上很多并行化的轻量级线程,核函数在device上执行时实际上是启动很多线程,一个kernel所启动的所有线程称为一个网格(grid),同一个网格上的线程共享相同的全局内存空间,grid是线程结构的第一层次,而网格又可以分为很多线程块(block),一个线程块里面包含很多线程。
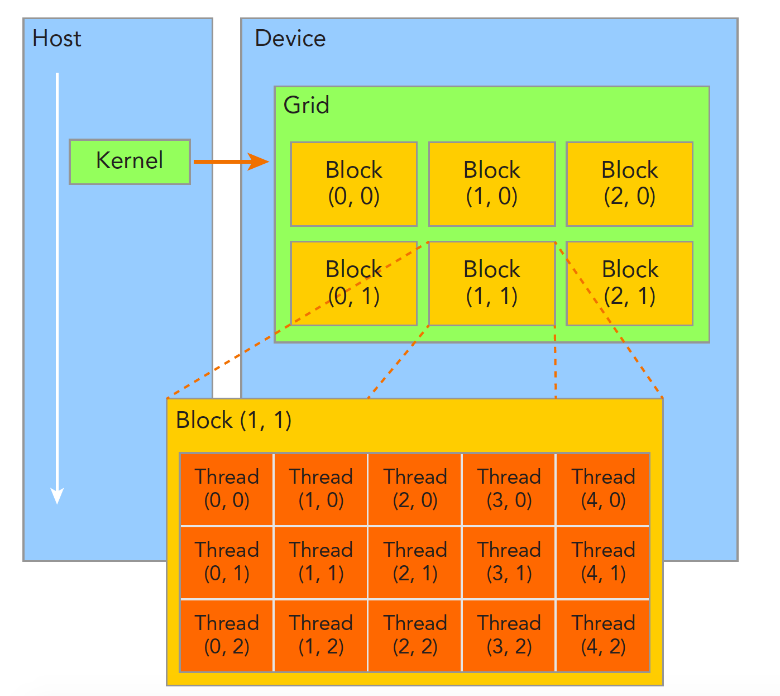
之后是线程的标号。grid和block都是定义为dim3类型的变量,dim3可以看成是包含三个无符号整数(x,y,z)成员的结构体变量,在定义时,缺省值初始化为1。因此grid和block可以灵活地定义为1-dim,2-dim以及3-dim结构(上图所示是一个2-dim的grid-block结构)。代码如下所示:
1
2
3
|
dim3 grid(3, 2);
dim3 block(5, 3);
kernel_fun<<< grid, block >>>(prams...);
|
每一个核函数都有两个内置的坐标变量blockIdx,threadIdx,标识其在(grid, block)中的位置。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
#include <cuda_runtime.h>
#include <stdio.h>
__global__ void checkIndex(void)
{
printf("threadIdx:(%d,%d,%d) blockIdx:(%d,%d,%d) blockDim:(%d,%d,%d) gridDim:(%d,%d,%d)\n",
threadIdx.x, threadIdx.y, threadIdx.z,
blockIdx.x, blockIdx.y, blockIdx.z, blockDim.x, blockDim.y, blockDim.z,
gridDim.x, gridDim.y, gridDim.z);
}
int main(int argc, char **argv)
{
int nElem = 6;
dim3 block(3);
dim3 grid((nElem + block.x - 1) / block.x);
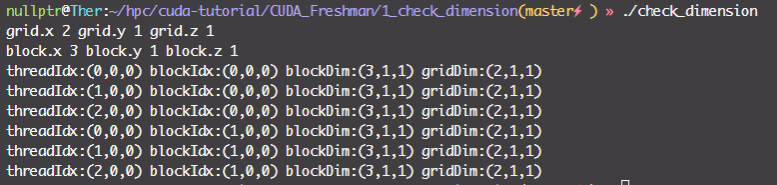
printf("grid.x %d grid.y %d grid.z %d\n", grid.x, grid.y, grid.z);
printf("block.x %d block.y %d block.z %d\n", block.x, block.y, block.z);
checkIndex<<<grid, block>>>();
cudaDeviceReset();
return 0;
}
|
此处注意,一个block上的线程是放在同一个流式多处理器(SM)上的。但是单个SM的资源有限,这导致线程块中的线程数是有限制的(1024)。CUDA采用单指令多线程(SIMT)架构来管理和执行线程,每32个线程为一组,被称为线程束(Warp),线程束中所有线程同时执行相同的指令。我们可以用以下代码获取GPU的一些硬件信息:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
#include <iostream>
int main(int argc, char **argv)
{
int dev = 0;
cudaDeviceProp devProp;
cudaGetDeviceProperties(&devProp, dev);
std::cout << "GPU device " << dev << ": " << devProp.name << std::endl;
std::cout << "SM number: " << devProp.multiProcessorCount << std::endl;
std::cout << "shared memory per block: " << devProp.sharedMemPerBlock / 1024.0 << " KB" << std::endl;
std::cout << "max threads per block: " << devProp.maxThreadsPerBlock << std::endl;
std::cout << "max threads per multiprocessor: " << devProp.maxThreadsPerMultiProcessor << std::endl;
}
|

实战1——矩阵加法
CUDA多线程并行的能力,经常用来将串行代码中的for并行化。例如,如果我们需要计算两个向量的和,串行写法如下:
1
2
3
4
|
void sumArraysOnHost(float *A, float *B, float *C, const int N) {
for (int i = 0; i < N; i++)
C[i] = A[i] + B[i];
}
|
而在并行写法下,我们只需要开若干个线程同步执行:
1
2
3
4
|
__global__ void sumArraysOnGPU(float *A, float *B, float *C) {
int i = threadIdx.x;
C[i] = A[i] + B[i];
}
|
接下来,我们使用CUDA编程的方法实现一个基础运算——矩阵乘法。我们的两个矩阵大小是4096x4096,由于一个线程块中的线程数上限是1024(32x32),所以我们需要的grid数是128x128。定义方法如下:
1
2
3
4
5
|
int nx = 1 << 12;
int ny = 1 << 12;
int nBytes = nx * ny * sizeof(float);
dim3 block(32, 32);
dim3 grid((nx - 1) / block.x + 1, (ny - 1) / block.y + 1);
|
调用方法如下:
1
|
sumMatrix<<<grid, block>>>(A_dev, B_dev, C_dev, nx, ny);
|
之后我们看在CPU上进行串行计算的代码。在此处我们利用指针将二维矩阵展开为一维矩阵进行处理:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
void sumMatrix2DonCPU(float *MatA, float *MatB, float *MatC, int nx, int ny)
{
float *a = MatA;
float *b = MatB;
float *c = MatC;
for (int j = 0; j < ny; j++)
{
for (int i = 0; i < nx; i++)
{
c[i] = a[i] + b[i];
}
c += nx;
b += nx;
a += nx;
}
}
|
而编写GPU核函数的关键是定位线程执行的布局。例如对于函数kernel_name<<<4,8>>>(argument list),其线程布局为:

据此可以得到每一个线程的唯一标识符,代码如下:
1
2
3
4
5
6
7
8
9
10
|
__global__ void sumMatrix(float *MatA, float *MatB, float *MatC, int nx, int ny)
{
int ix = threadIdx.x + blockDim.x * blockIdx.x;
int iy = threadIdx.y + blockDim.y * blockIdx.y;
int idx = ix + iy * ny;
if (ix < nx && iy < ny)
{
MatC[idx] = MatA[idx] + MatB[idx];
}
}
|
完整代码见CUDA编程入门(三)从矩阵加法例程上手CUDA编程。
实战2——矩阵乘法
使用一维向量实现二维矩阵乘法,代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
void cpu_mat_mul(int *mat1, int *mat2, int *result)
{
for (int r = 0; r < R_SIZE; r++)
{
for (int c = 0; c < R_SIZE; c++)
{
for (int n = 0; n < R_SIZE; n++)
{
result[r * R_SIZE + c] += mat1[r * R_SIZE + n] * mat2[n * R_SIZE + c];
}
}
}
}
|
如果将最外层并行化,可以写作:
1
2
3
4
5
6
7
8
9
10
11
|
__global__ void gpu_mat_mul(int *mat1, int *mat2, int *result)
{
const int r = blockIdx.x * THREAD_NUM + threadIdx.x;
for (int c = 0; c < R_SIZE; c++)
{
for (int n = 0; n < R_SIZE; n++)
{
result[r * R_SIZE + c] += mat1[r * R_SIZE + n] * mat2[n * R_SIZE + c];
}
}
}
|
当然,此处还有更多的优化空间,有时间再补。
实战3——规约
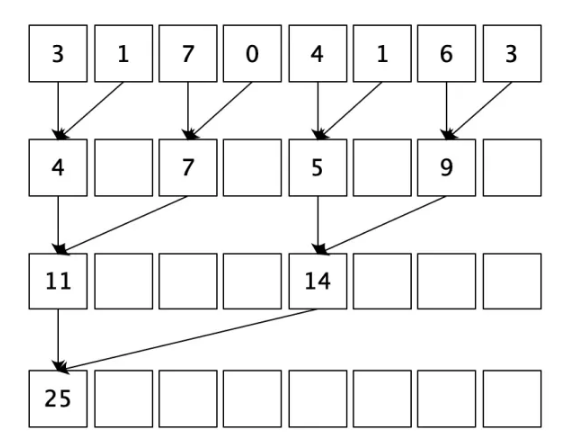
并行规约指的是,有N个输入数据,使用一个符合结合律的二元操作符作用其上,最终生成1个结果。规约的一般思路如下:首先把输入数组划分为更小的数据块,之后用一个线程计算一个数据块的规约值,最后把所有部分和再求和得出最终结果。
这样,相比于串行实现:
1
2
3
|
int sum = 0;
for (int i = 0; i < N; i++)
sum += array[i]
|
其复杂度为$O(N)$,并行实现的复杂度变为了$O(N\log_2N)$。
我们编写一个递归的CPU程序(注意大部分GPU架构不支持递归):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
int recursiveReduce(int *data, int const size)
{
// terminate check
if (size == 1)
return data[0];
// renew the stride
int const stride = size / 2;
if (size % 2 == 1)
{
for (int i = 0; i < stride; i++)
{
data[i] += data[i + stride];
}
data[0] += data[size - 1];
}
else
{
for (int i = 0; i < stride; i++)
{
data[i] += data[i + stride];
}
}
// call
return recursiveReduce(data, stride);
}
|
GPU并行程序如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
__global__ void reduceNeighbored(int * g_idata,int * g_odata,unsigned int n)
{
// set thread ID
unsigned int tid = threadIdx.x;
// boundary check
if (tid >= n) return;
// convert global data pointer
int *idata = g_idata + blockIdx.x * blockDim.x;
// in-place reduction in global memory
for (int stride = 1; stride < blockDim.x; stride *= 2)
{
if ((tid % (2 * stride)) == 0)
{
idata[tid] += idata[tid + stride];
}
// synchronize within block
__syncthreads();
}
// write result for this block to global mem
if (tid == 0)
{
g_odata[blockIdx.x] = idata[0];
}
}
|
当然,其实这种算法有一个明显的缺点:只有一半的线程是活跃的,而且每进行一轮计算后,活跃的线程数都会减少一半,这是条件表达式的使用造成的。比如在第一轮迭代时,只有偶数ID的线程会为True,其主体才能得到执行。这会导致线程束的分化,也就是说只有一部分线程是活跃的,但是所有的线程仍然都会被调度。后续的优化将会解决这个问题。
Reference