组成
PyTorch中显存的占用通常分为5个部分:
-
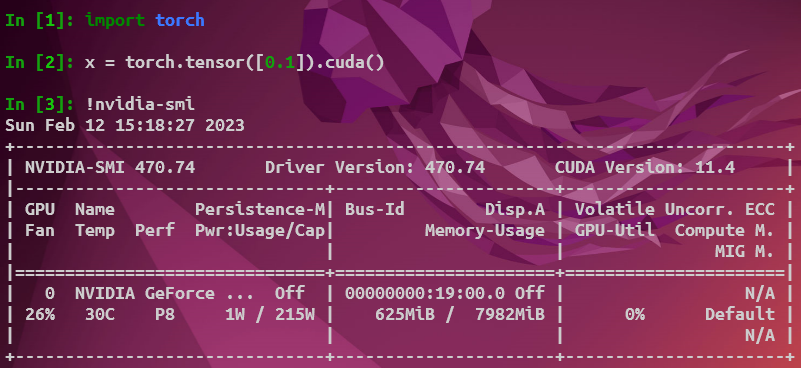
PyTorch context:只要把任何东西放在GPU中,就一定会占用一定数量的显存(视版本的不同有变化)。
https://stackoverflow.com/questions/43244645/what-is-a-cuda-context
-
model parameters
-
gradients
-
optimizer states
-
intermediate activations
其中intermediate activations占绝对大头,optimizer states的显存使用量大约为model parameters的整数倍(Adam:2, SGD:1)
机制
在分析torch的显存占用时不能使用nvidia-smi,PyTorch使用缓存分配器来管理缓存分配,在缓存分配器的机制下, 一个Tensor就算被释放了,进程也不会把空闲出来的显存还给GPU,而是等待下一个Tensor来填入这一片被释放的空间(即只要一个Tensor对象在后续不会再被使用,那么PyTorch就会自动回收该Tensor所占用的显存,并以缓冲区的形式继续占用显存,所以在nvidia-smi/gpustat中看到的显存并没有减少)。
由上可知,这一指令不能准确地给出某一个时间点具体的Tensor占用的显存,而是显示的已经分配到的显存缓冲区和torch在创建cuda进程时所需开销的和。
API
有3个API用于分析显存:
torch.cuda.memory_allocated():反馈当前进程中torch.Tensor所占用的GPU显存(注意是只包括torch.Tensor)torch.cuda.max_memory_allocated():到调用函数为止所达到的最大的显存占用字节数torch.cuda.memory_reserved():当前进程所分配的显存缓冲区
大模型的优化
如果仔细观察传统推理时模型的代码,会发现其加载代码时的步骤如下:
- 用随机初始化的权重创建模型
- 从磁盘上加载模型的权重
- 在模型中加载这些权重
这一过程其实有很多不合理之处:创建模型时的随机权重是无用的,此后在载入checkpoint的state_dict之后,程序中实际存在双份权重。为了解决这一问题,详见instantiating-an-empty-model。
https://huggingface.co/docs/accelerate/usage_guides/big_modeling
而传统推理时的模型分发机制如下:
- 从模型中加载整个权重到单GPU上
- 将模型分发给不同GPU
我们能否在载入模型时就将其分发给不同的GPU?详见Loading weights。